








Драйверы серии MST предназначены для управления шаговыми двигателями. Драйвер получает сигналы от контроллера и генерирует электрические импульсы для управления обмотками двигателя, обеспечивая его движение с заданным шагом. При этом драйвер регулирует ток для оптимальной работы, предотвращая перегрев и минимизируя потери.
Преимущества
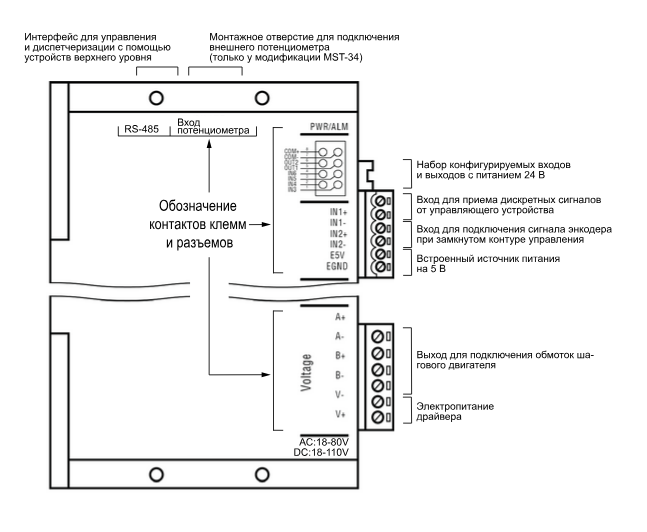
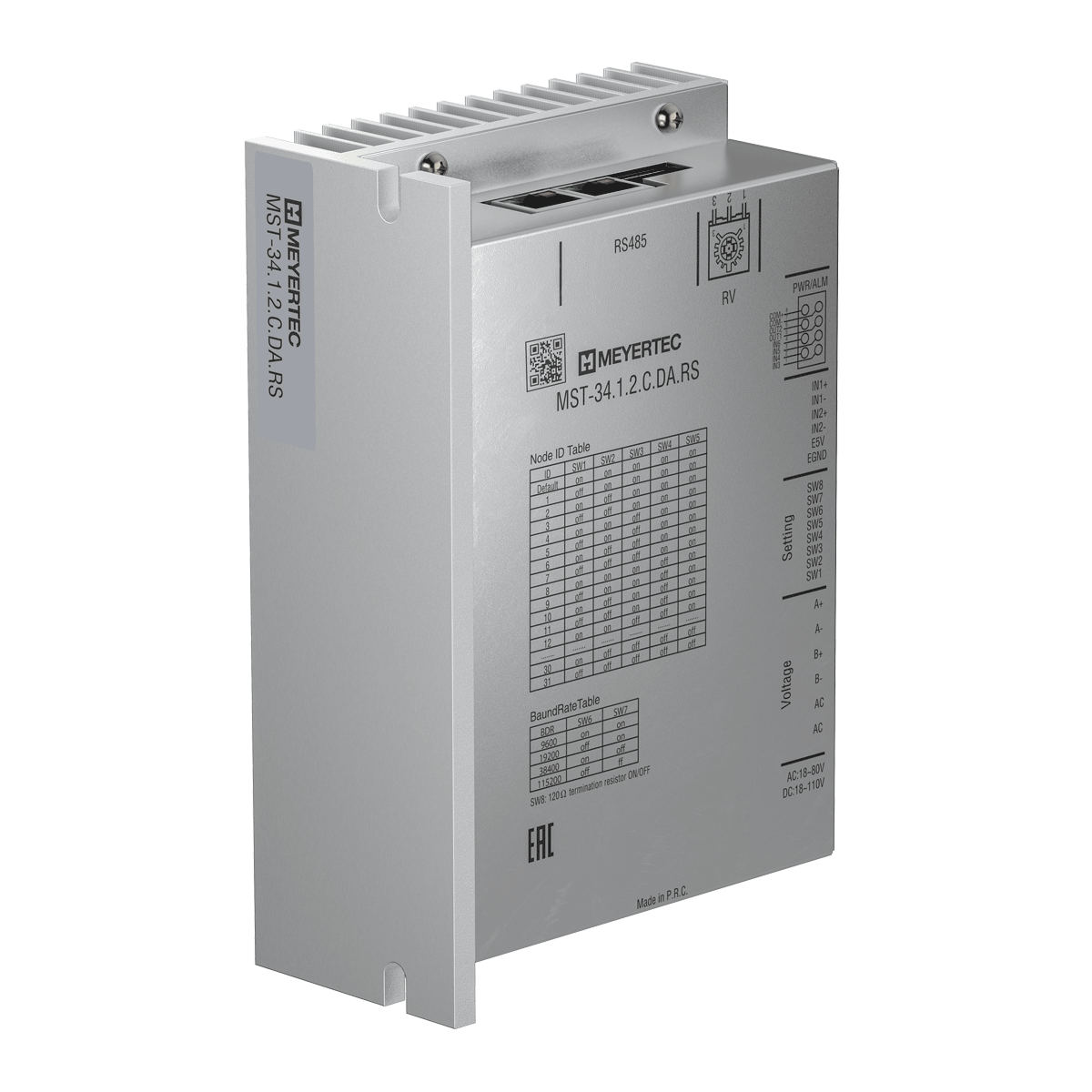
- Наличие интерфейса RS-485.
- Возможность управления двухфазными и трехфазными шаговыми двигателями.
- Наличие трех режимов управления:
- от внешних импульсов;
- посредством внешних дискретных сигналов (режим IO);
- по интерфейсу RS-485 (Modbus RTU).
- Встроенный S-образный профиль кривой разгона/торможения.
- Возможность настройки параметров разгона и параметров торможения отдельно.
- Конфигурация и настройка режимов работы прибора и параметров управления с помощью программного конфигуратора.
- Возможность управления шаговым двигателем с обратной связью (серворежим).
Примеры применений
Системы этикетировки и упаковки
Используются в конвейерных системах для точного позиционирования этикетки или самой продукции для упаковки.
Преимущества:
- не требуют обратной связи для контроля положения, что упрощает систему и повышает ее надежность
- высокая точность позиционирования исполнительных механизмов
Автоматизированные системы подачи
Используются в конвейерах или системах подачи деталей, где требуется точное перемещение на фиксированные расстояния.
Преимущества:
- Надежность и простота управления движением на небольшие расстояния.
- Экономичность для задач с низкими требованиями к скорости.
Станки с ЧПУ (гравировальные и фрезерные)
Шаговые приводы применяются для перемещения инструмента или заготовки с высокой точностью.
Преимущества:
- Высокая точность для задач, где не требуется высокая скорость.
- Отсутствие необходимости в датчиках положения, что упрощает систему.
Роботизированные манипуляторы для сборки
В роботах для сборки мелких деталей шаговые приводы обеспечивают точное позиционирование конечного эффектора.
Преимущества:
- Высокая точность позиционирования в малых областях.
- Простота интеграции в системы с фиксированными траекториями движения.